🎉 Win the Runner-up of CVPR Autonomous Grand Challenge 2024
Jun 1, 2024· ,·
1 min read
,·
1 min read
Zhimin Liao
Ping Wei

Table of Contents
Task Description
The representation of 3D bounding boxes is not enough to describe general objects (obstacles). Instead, inspired by concepts in robotics, we perform general object detection via an occupancy representation to cover more irregularly shaped (e.g., protruding) objects. The goal of this task is to predict the 3D occupancy of the complete scene and the flow of the foreground objects given the input image from six cameras.
LearderBoard
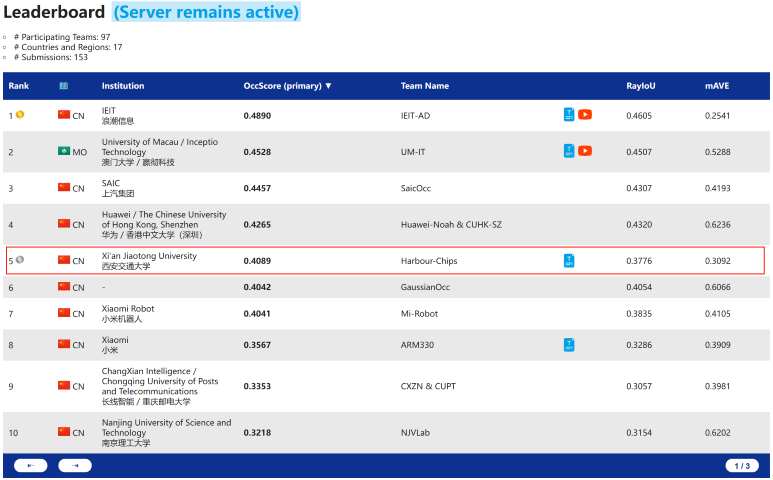
About 97 Participating teams and 153 submissions. We won the Runner-up of the CVPR Autonomous Grand Challenge 2024 in Occupancy and Flow Prediction track!
Technical Report
The technical report is available on arXiv.
