Semantic consistency reasoning for 3-D object detection in point clouds
Our main contribution:
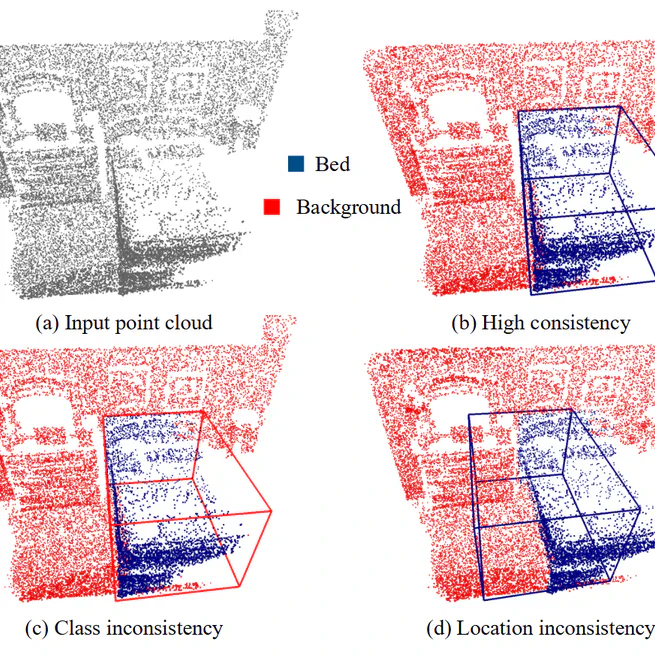
It proposes a framework that integrates semantic segmentation of point clouds to train the 3D object detection model and thus enhance its performance. It proposes a semantic consistency mechanism and a corresponding loss function that regulate the relationships between predicted 3D boxes and internal points. It implements and tests the consistency mechanism on three different 3D detectors to prove its universality. The model achieves better results than comparison studies on three challenging datasets. The effectiveness of the approach is verified with ablation studies.
Dec 19, 2023